
Animation Fundamentals: Screws
A screw, or threaded rod, is useful for creating consistent linear motion. Screw drives are somewhat interchangeable with reciprocating cranks; the difference is that the velocity of the movement is constant across its full range of motion with a screw drive, whereas the velocity varies with a crank. However, cranks have the advantage of not requiring limit switches, and being able to run continuously.
Screw drives are somewhat interchangeable with belts or chains, depending on the length, speed, and torque required. Screw drives are best for applications requiring slow, precise movement.
Typical Configuration
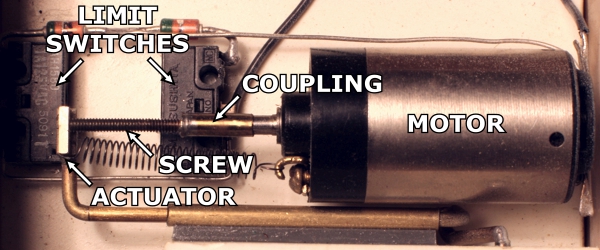
A typical screw drive comprises a motor, coupling, screw, bearings, actuator and limit switches. Some parts are optional:
- the bearing near the motor can be omitted, assuming the motor bearing can handle the load
- the coupling should be flexible to accommodate any slight misalignment between motor and screw; it can be rigid if the motor is not rigidly mounted
- both bearings can be omitted if the screw is short and the coupling is rigid (see example below)
- the limit switches can be omitted, but are strongly recommended to prevent over-travel and possible damage to the drive and/or the model.
Behavior
Cranks are ideal for most cyclical actions, except for those that require constant velocity. The movement over time of a crank resembles a sine wave, since the velocity changes: it starts out slow, accelerates, then slows down again before reversing. The behavior of some devices is very well-suited to the sine wave behavior. An example would be a rocking chair: it slows down gradually before stopping at the end of each cycle, rather than stopping and starting instantaneously. An example where this would not be acceptable would be something like rollup doors: they move at a constant rate in each direction, start to finish. In this case, a linear drive would be preferable. Described graphically, the crank drive would be the sine (curved) wave, below left; the linear drive would be the triangular wave, below right.
The choice of which to use is dependent on two factors: how the real-life device functions, and which is more practical to implement under the circumstances. Note, however, that a crank can simulate a linear drive if only a small portion of its full rotation is used, which would be constrained by limit switches; see the final mechanism for the crossing gates to see this implementation. (This is how Tortoise switch machines behave: they're an entirely rotary mechanism with an almost perfect linear motion output.)
Practical Application
This mechanism operates the firehouse doors.